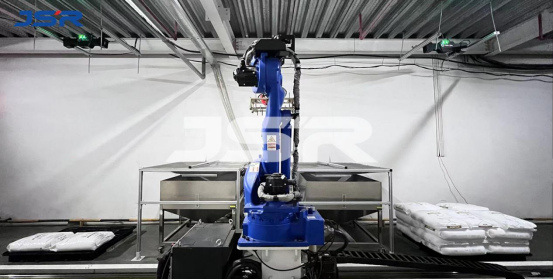
जेएसआर'च्या रोबोटिक हाताळणी प्रक्रिया ऑटोमेशनसह यास्कावा प्लास्टिकच्या कणांच्या पिशव्यांच्या हाताळणी आणि अनपॅकिंगमध्ये हँडलिंग रोबोटचा वापर केला जातो, तो एकउत्पादन ऑटोमेशनला प्रोत्साहन देण्यासाठी मूल्य योगदान देणारे, अचूक, विश्वासार्ह आणि शाश्वत हाताळणी ऑपरेशन.
यंत्रसामग्री, शेती, कपडे, बांधकाम किंवा दैनंदिन जीवनातील कोणत्याही बाबींमध्ये, पुनर्वापर केलेल्या प्लास्टिक कणांची संख्या आपल्याला दिसून येते. पॅकेजिंगनंतर, हे कण हाताने हाताळावे लागतात, जे उच्च खर्च आणि उच्च श्रम तीव्रतेसह अधूनमधून काम आहे. ग्राहकाचा मागील कामाचा वेळ 8 तास होता आणि प्रत्येक बॅगची सामग्री 25 किलो होती. मॅन्युअल कार्यक्षमता प्रति मिनिट 2 पिशव्या आहे आणि एका दिवसात 960 पिशव्या वेगळे केल्या जाऊ शकतात. रोबोट हाताळणी आणि वेगळे केल्यानंतर कामाचा वेळ 24 तास आहे, जो सतत चालवता येतो आणि कार्यक्षमता प्रति मिनिट 3 पिशव्या आहे आणि एका दिवसात 4320 पिशव्या वेगळे केल्या जाऊ शकतात.
जिशने राबवलेले उपायग्राहकांसाठी इंग्रजी: यास्कावा हँडलिंग रोबोट GP180, 7.5 मीटर लांब ग्राउंड रेल, मटेरियल बिन, मटेरियल रॅक, GP180 कमाल भार 180 किलो, कमाल आर्म स्पॅन 2702 मिमी. 7.5 मीटर पृथ्वी कक्षा प्रभावी प्रवास 6 मीटर आहे, हालचाल गती 0.7 मीटर/सेकंद आहे. 3D व्हिज्युअल आयडेंटिफिकेशन ब्लँकिंग सिस्टम. 3D व्हिज्युअल आयडेंटिफिकेशन ब्लँकिंग सिस्टम, लर्निंग फंक्शनसह कॅमेरा, सुरुवातीच्या मटेरियल डेटा संपादन आणि नंतर मटेरियल मॉडेलिंगद्वारे, जेणेकरून कॅमेरा ओळखण्याचा यशस्वी दर 99.9% आहे.
स्वयंचलित उत्पादनामुळे कामाची कार्यक्षमता, स्थिर उत्पादन क्षमता, अचूक वितरण, उच्च सुरक्षितता, विद्यमान क्षेत्राचा वाजवी वापर, कॉर्पोरेट प्रतिमा आणि कार्यशाळेची स्वच्छता सुधारते, ज्यामुळे मानवरहित उत्पादन साध्य होते.
पोस्ट वेळ: सप्टेंबर-२६-२०२२
